|
Yehonathan Litman I'm a fourth year PhD student at in the Robotics Institute, Carnegie Mellon University, advised by Shubham Tulsiani and Fernando De la Torre. I have previously interned at Meta Reality Labs and was a visiting researcher at FAIR. I'm focusing on how large generative models can serve as priors for faithfully reconstructing the world by capturing its underlying intrinsic properties. My work is supported in part by an NSF Graduate Research Fellowship. I am always open to talking about research ideas or potential collaborations. Feel free to email me. Email / CV / Google Scholar / Twitter / Github |

|
Selected Research |
|
LightSwitch: Multi-view Relighting with Material-guided Diffusion
Yehonathan Litman, Fernando De la Torre, Shubham Tulsiani ICCV, 2025 project page / arXiv / github Efficiently relight any number of input images to a target lighting using inferred intrinsic property cues, extensible to 3D novel view relighting. |
|
|
MaterialFusion: Enhancing Inverse Rendering with Material Diffusion Priors
Yehonathan Litman, Or Patashnik, Kangle Deng, Aviral Agrawal, Rushikesh Zawar, Fernando De la Torre, Shubham Tulsiani 3DV, 2025 project page / arXiv / github Distill a material diffusion prior model into material parameters during inverse rendering to improve intrinsic decomposition and novel relighting. |
|
|
Global Visual‑Inertial Ground Vehicle State Estimation via Image Registration
Yehonathan Litman*, Daniel Mcgann*, Eric Dexheimer, Michael Kaess ICRA, 2022 video / IEEEXplore Reconstruct input images in a 3D occupancy grid and project to bird's eye view of the environment, register that to satelite imagery data to correct SLAM drift in real time without requiring GPS. |
|
|
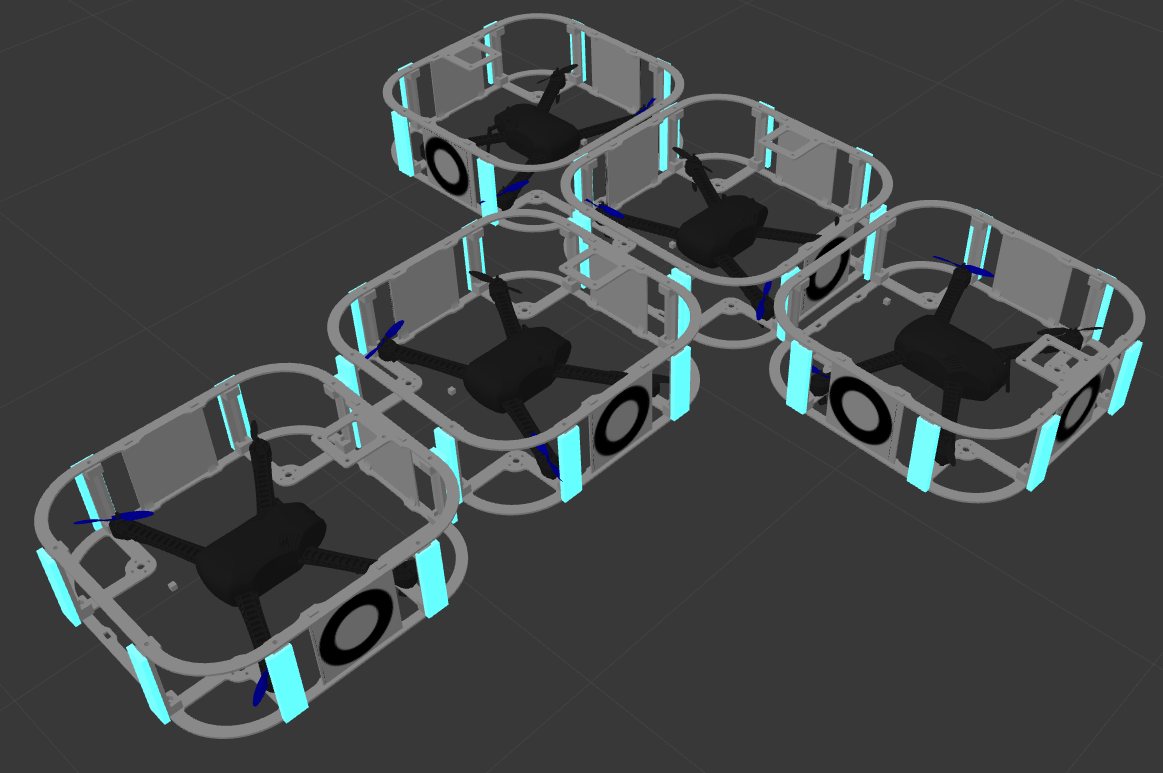
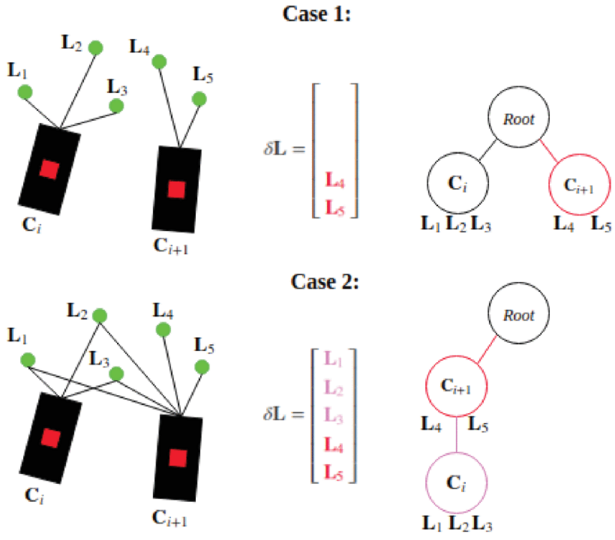
Vision‑Based Self‑Assembly for Modular Multirotor Structures
Yehonathan Litman, Neeraj Gandhi, Linh Thi Xuan Phan, David Saldaña IEEE RA-L & ICRA, 2021 (Finalist in Multi‑Robot Systems) video / IEEEXplore Dynamically assign a drone agent leader to heuristically assemble a large variety of drone swarm formations using only vision and onboard sensors. |
|
Accelerated Visual Inertial Navigation via Fragmented Structure Updates
Yehonathan Litman, Ya Wang, Ji Liu IROS, 2019 IEEEXplore Retain features across frames selectively based on shared information and use hardware acceleration to dramatically improve VIO SLAM efficiency. |

|
Invariant Filter Based Preintegration for Addressing the Visual Observability Problem
Yehonathan Litman, Ya Wang, Libo Wu IEEE MIT URTC, 2018 IEEEXplore Addressing the visual observability problem in VIO by using invariant filtering to improve efficiency and accuracy. |
Awards |
Misc. |

|
Save the Manatees! Even if you're not from Florida (or all the other places that have manatees), you can still help! |
|
Credits: Jon Barron. |